隨著智能交通與自動駕駛技術的飛速發展,構建一個高效、可靠、安全的網絡通信系統,以實現多車輛間的協同感知、決策共享,以及車輛與后方指揮中心的實時數據交互,已成為推動行業進步的核心基礎設施。本方案旨在設計一套端到端的綜合通信系統,并闡述其開發集成路徑。
一、 系統總體架構
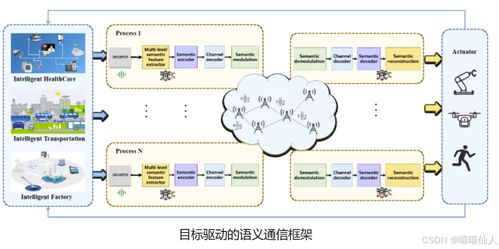
系統采用“云-管-邊-端”四級分層架構,確保數據傳輸的低延遲、高帶寬與廣覆蓋。
- 終端層(車端/路側設備):由車載單元(OBU)、各類傳感器(攝像頭、雷達、定位模塊)及路側單元(RSU)構成。負責采集車輛狀態、環境感知、高清視頻等海量原始數據,并進行初步的預處理與格式標準化。
- 邊緣層:部署于區域基站或交通樞紐附近的邊緣計算節點(MEC)。負責處理對時延極為敏感的業務,如車輛間的實時協同預警(V2V)、局部交通流優化,并對上傳數據進行聚合、過濾與輕量化,減輕核心網壓力。
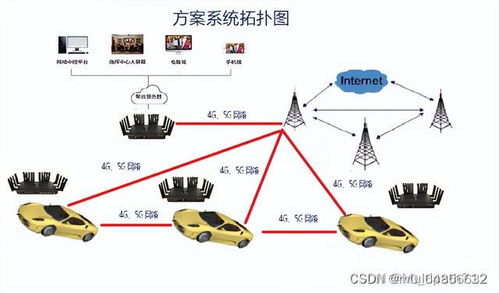
- 網絡管道層:綜合利用多種通信技術,形成異構融合的網絡通道。
- 短距直連通信:采用DSRC或C-V2X PC5接口,實現車輛與車輛(V2V)、車輛與基礎設施(V2I)間毫秒級、高可靠的低延遲直接通信,適用于安全預警等關鍵業務。
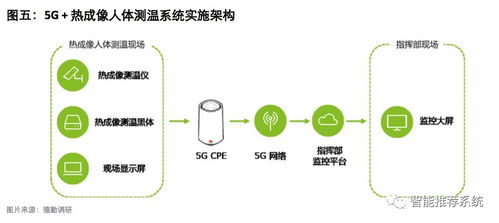
- 廣域蜂窩通信:基于4G/5G(及未來5.5G/6G)網絡,特別是利用5G網絡切片技術,為車輛與指揮中心(V2N)的大帶寬、遠距離數據傳輸(如高清視頻回傳、批量狀態上報、高精地圖下載)提供保障。
- 云端平臺層(指揮中心):構建于云計算平臺之上,包含數據中心、業務中臺與指揮調度平臺。負責海量數據的存儲、深度分析與挖掘,實現全局交通監控、宏觀調度、遠程診斷、OTA升級以及面向公眾的信息服務。
二、 數據傳輸與通信協議
- 數據類型與QoS分級:對數據進行分類并匹配差異化服務質量(QoS)。
- 安全類數據(如碰撞預警):最高優先級,要求極低時延(<20ms)與超高可靠性,優先通過直連C-V2X傳輸。
- 控制類數據(如調度指令、協同駕駛):中等優先級,要求低時延與高可靠,可通過5G uRLLC切片或C-V2X傳輸。
- 信息類數據(如狀態上報、交通信息):允許一定時延,通過4G/5G eMBB切片傳輸。
- 娛樂與高帶寬數據(如高清視頻監控):大帶寬需求,通過5G eMBB切片傳輸。
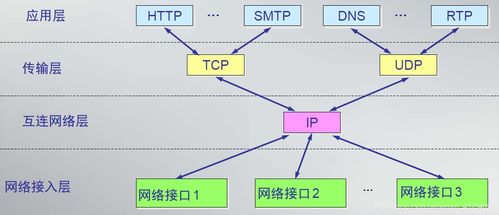
- 協議棧:應用層采用行業標準或自定義協議,如基于JSON或Protocol Buffers的消息格式;網絡層支持IPv6,以滿足海量設備地址需求;接入層適配多種無線空口協議。
三、 通信系統關鍵技術與安全機制
- 關鍵技術:
- 網絡切片:在統一的5G物理網絡上邏輯隔離出多個虛擬網絡,分別服務于安全、控制、信息等不同業務,保障關鍵業務性能。
- 移動邊緣計算(MEC):將計算能力下沉至網絡邊緣,大幅減少業務響應時間,并降低回傳帶寬消耗。
- 多接入邊緣計算(MEC)與融合:實現C-V2X與5G網絡在邊緣側的協同與數據融合。
- 安全機制:建立從終端到云端的縱深防御體系。包括:基于公鑰基礎設施(PKI)的數字證書實現車輛、RSU、服務器的雙向認證;應用層數據加密傳輸;入侵檢測與防御系統(IDS/IPS);以及定期的安全漏洞掃描與固件安全更新機制。
四、 系統開發與集成策略
- 分層開發與模塊化設計:遵循軟件定義汽車(SDV)理念,將通信功能模塊化(如協議棧模塊、安全模塊、設備管理模塊),降低耦合度,便于獨立開發、測試與升級。
- 硬件與軟件集成:
- 硬件選型:選擇支持多模通信(如5G + C-V2X)的車載通信模組及高性能路側設備。
- 軟件集成:開發統一的設備接入與管理平臺,集成協議棧、驅動、中間件及上層應用。利用容器化技術(如Docker)部署邊緣應用,提升部署靈活性與資源利用率。
- 測試與驗證:構建從實驗室仿真(使用網絡模擬器、車輛運動模型)、封閉場地測試到開放道路示范的遞進式測試驗證體系。重點測試高并發場景下的系統穩定性、異構網絡切換的平滑性以及端到端安全性能。
- 標準遵循與生態合作:積極采納3GPP、IEEE、CCSA等國內外相關通信標準,確保系統互聯互通。與芯片廠商、設備供應商、電信運營商及整車企業建立緊密的產業合作生態。
五、 與展望
本方案提出的多層次、多技術融合的通信系統,能夠有效滿足智能網聯汽車時代對數據傳輸的多元化需求。未來的開發集成工作需持續關注通信技術的演進(如5.5G/6G、衛星互聯網),并深化人工智能在數據壓縮、網絡智能調度與安全威脅感知方面的應用,最終構建一個更智能、更堅韌、更普惠的車路云一體化網絡。